
Modelling of maneuvering behavior of ships when encountering and overtaking
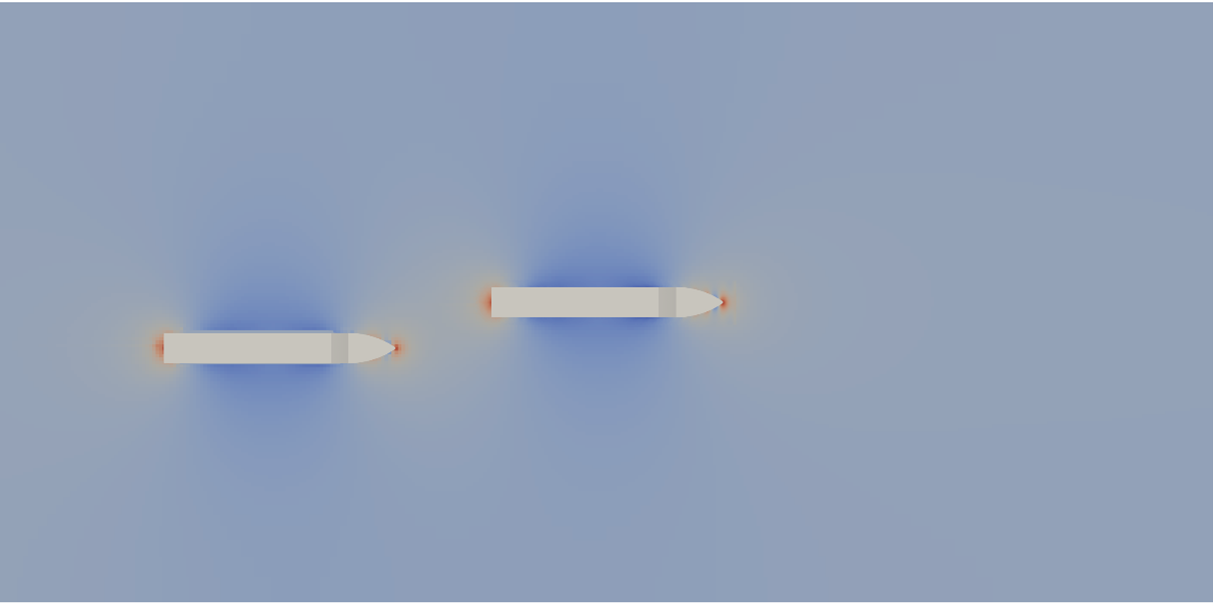
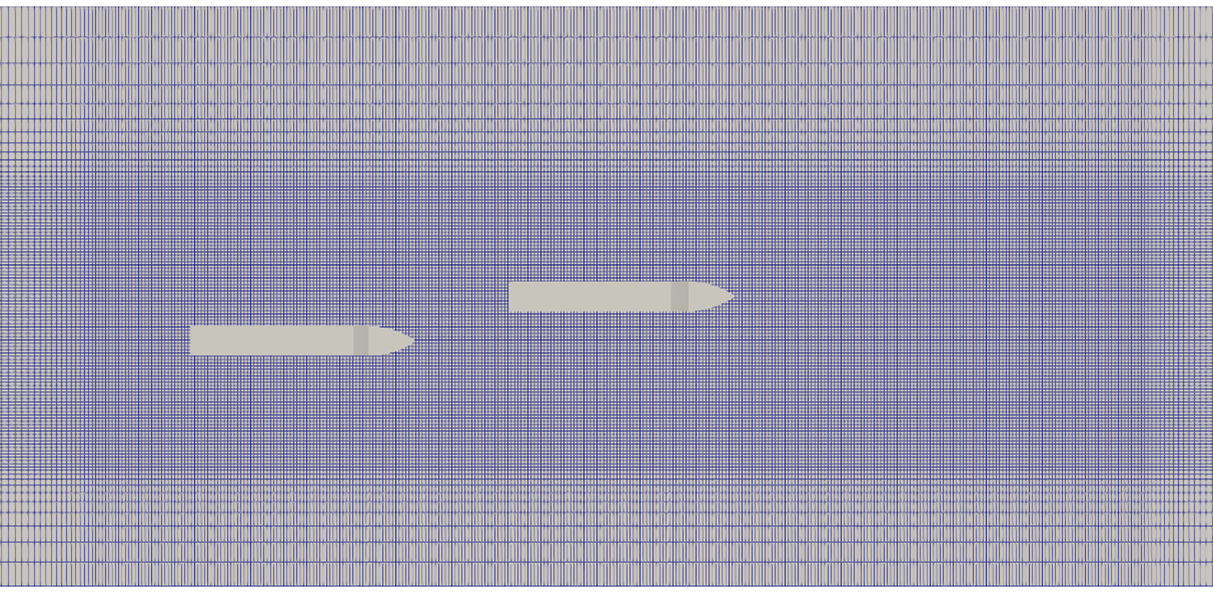
Ships encountering and overtaking have a relatively small distance from one another, this is typical on inland waterways due to the water topology and traffic density. In order to map the maneuvering behavior in these driving situations, the so-called Abkowitz-based maneuvering model is further developed, which approximates the forces and moments on the ship using a modified Taylor series for the kinematic and geometric parameters. In the further development of the Abkowitz model, additional forces and moments that are induced by passing and overtaking ships are considered in the Taylor series. Numerical flow simulations with the Reynolds-averaged Navier-Stokes equations (RANSE) are used for the systematic investigation of the relevant state variables of the ship when encountering and overtaking.
Hardware equipment (sensors, actuators, communication)
Trajectories from AIS data
Evaluation man-control station control station







